
About me
I am currently a Research Assistant Professor at Shanghai Jiao Tong University (SJTU). I obtained my Ph.D. degree from the University of Macau (UM) in 2022. Following that, I was a Post-doctoral Fellow at UM until the end of 2023.
Please note that my previous email address, ganyu@um.edu.mo, is no longer active. For any future correspondence, please contact me at sjtuganyu at sjtu dot edu dot cn.
I obtained the qualification as a doctoral advisor at SJTU in 2024. Should you be interested in working with me as a Ph.D. or master’s student in Control Science and Engineering, please feel free to contact me via email.
I specialize in the automation of robotic systems, particularly focusing on quadrotor unmanned aerial vehicles and spacecraft. My research endeavors within this discipline encompass a comprehensive investigation into the domains of control, estimation, and motion planning, aiming to advance this field with innovative insights and practical solutions.
News
-
July 11, 2024, I obtained the qualification as a doctoral advisor at SJTU.
-
March 6, 2024, we will be presenting two of our works at ICRA2024.
-
March 5, 2024, our manuscript titled “Robust Cooperative Transportation of a Cable-Suspended Payload by Multiple Quadrotors Featuring Cable-Reconfiguration Capabilities” has been accepted for publication in IEEE Transactions on Intelligent Transportation Systems.
-
January 3, 2024, our manuscript titled “Robust Collision-free Formation Control of Quadrotor Fleets: Trajectory Generation and Tracking with Experimental Validation” has been accepted for publication in Control Engineering Practice.
-
January 1, 2024, started a new chapter at Shanghai Jiao Tong University.
-
August 24, 2023, our manuscript titled “UDE-based Robust Control of a Quadrotor-Slung-Load System” has been accepted for publication in IEEE Robotics and Automation Letters.
-
August 10, 2023, our manuscript titled “Robust Nonlinear 3D Control of an Inverted Pendulum Balanced on a Quadrotor” has been accepted for publication in Automatica.
Research (highlights)
The complete list of my research publications can be found at 
.
Robust Control of Unmanned Aerial Vehicles in the presence of unknown time-varying dynamics
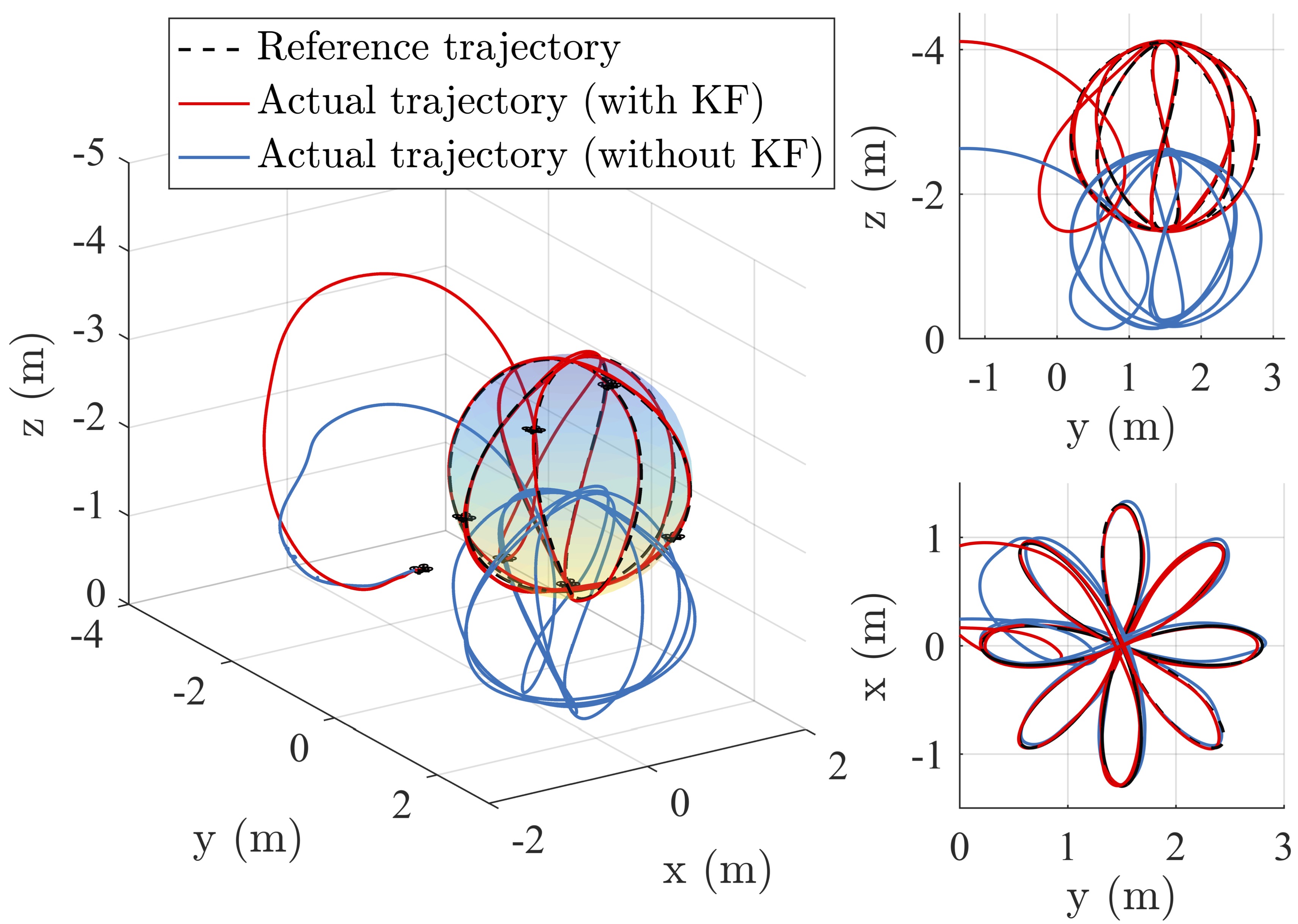
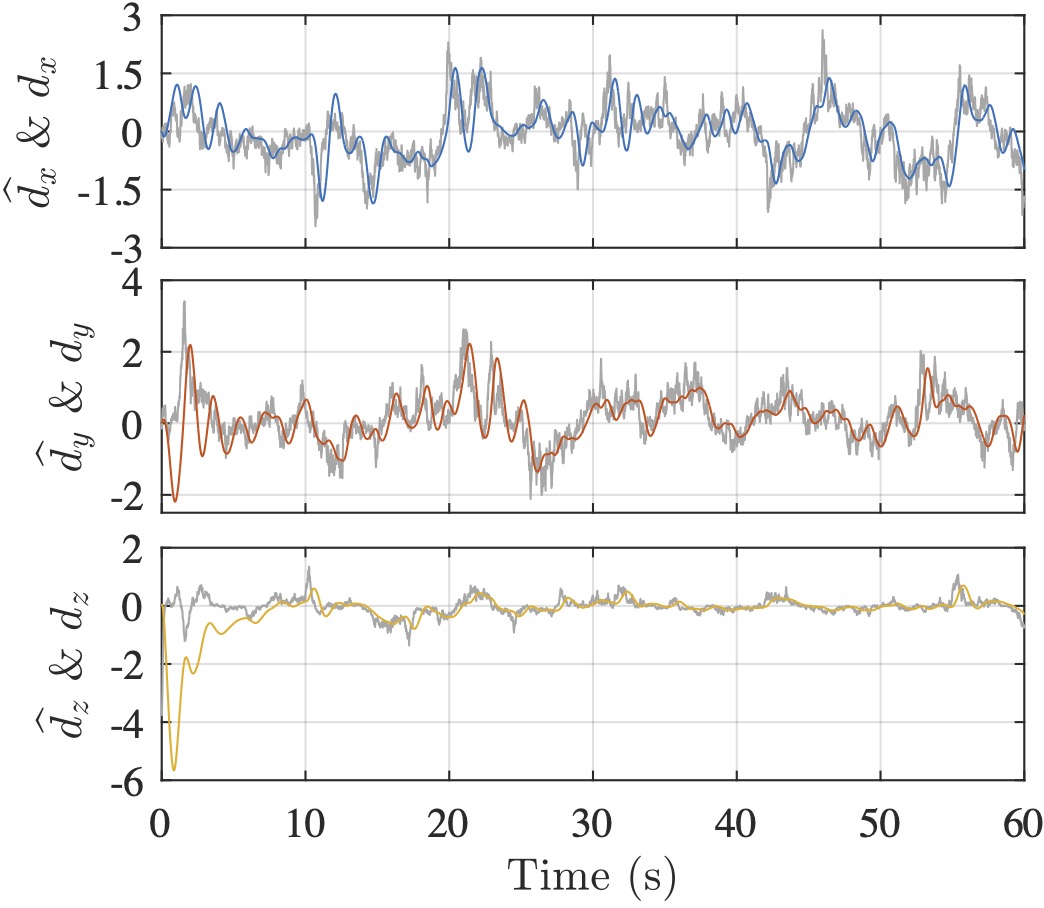
Kalman-based velocity-free trajectory tracking control of an underactuated aerial vehicle with unknown system dynamics, Joel Reis, Gan Yu, and Carlos Silvestre, Automatica, 2023
A Kalman filter for the linear motion subsystem is designed. The filter attenuates the noise of position measurements, and simultaneously estimates the linear velocity of the vehicle as well as an unknown term of lumped dynamics. The output and residual of the filter are then fed to a nonlinear controller.
Quadrotor Neural Network Adaptive Control: Design and Experimental Validation, Gan Yu, Joel Reis, and Carlos Silvestre, IEEE Robotics and Automation Letters, 2023
We employ an adaptive neural network, used to approximate the partially unknown system, in tandem with a simple controller designed for trajectory tracking, not of the center of mass, but of a point located along the UAV’s vertical body axis.
Nonlinear Control and Trajectory Generation for a Quadrotor With a Cable Suspended Load
Nonlinear backstepping control of a quadrotor-slung load system, Gan Yu, David Cabecinhas, Rita Cunha, and Carlos Silvestre, IEEE/ASME Transactions on Mechatronics, 2019
Reduced-Complexity Active Disturbance Rejection Controller for Quadrotor-Slung-Load Transportation, Gan Yu, Joel Reis, David Cabecinhas, Rita Cunha, and Carlos Silvestre, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2023
The problem of trajectory tracking control of a quadrotor-slung-load system is addressed.
Aggressive maneuvers for a quadrotor-slung-load system through fast trajectory generation and tracking, Gan Yu, David Cabecinhas, Rita Cunha, and Carlos Silvestre, Autonomous Robots, 2022
We propose a framework to efficiently generate aggressive load-swing trajectories. Trajectory generation for the load aims to minimize the fifth order time derivative of the load position which, indirectly, minimizes the quadrotor angular velocity actuation. Aggressive load-swing trajectories are obtained by having the constraints for load cable direction embedded into the trajectory generation via constraints on the load acceleration.
Robust Cooperative Transportation of a Cable-Suspended Payload by Multiple Quadrotors
Robust Cooperative Transportation of a Cable-Suspended Payload by Multiple Quadrotors Featuring Cable-Reconfiguration Capabilities, Yanhu Wang, Gan Yu, Wei Xie, Weidong Zhang, and Carlos Silvestre, IEEE Transactions on Intelligent Transportation Systems, 2024
We investigate the tracking control of a multi-quadrotor slung-load system (MQSLS) and introduce a novel force distribution algorithm, which bifurcates the cooperative control to two distinct components: slung-load position control; and cable configuration control along with quadrotor attitude control. Employing this strategy results in a cooperative controller that: (i) relaxes the constraints on cable configuration; and (ii) requires only up to the third time derivative of the reference trajectory.
Flying Inverted Pendulum Balanced on a Quadrotor
Robust Nonlinear 3D Control of an Inverted Pendulum Balanced on a Quadrotor, Weiming Yang, Gan Yu, Joel Reis, and Carlos Silvestre, Automatica, 2024
This paper addresses the nonlinear control problem of balancing an inverted pendulum on an underactuated unmanned aerial vehicle.
Education
- August 2015 - April 2022, Doctor of Philosophy (Ph.D.) in Electrical and Computer Engineering, University of Macau, advised by Prof. Carlos Silvestre.
- August 2011 - June 2015, Bachelor of Science (B.Sc.) in Electromechanical Engineering, University of Macau.
Awards
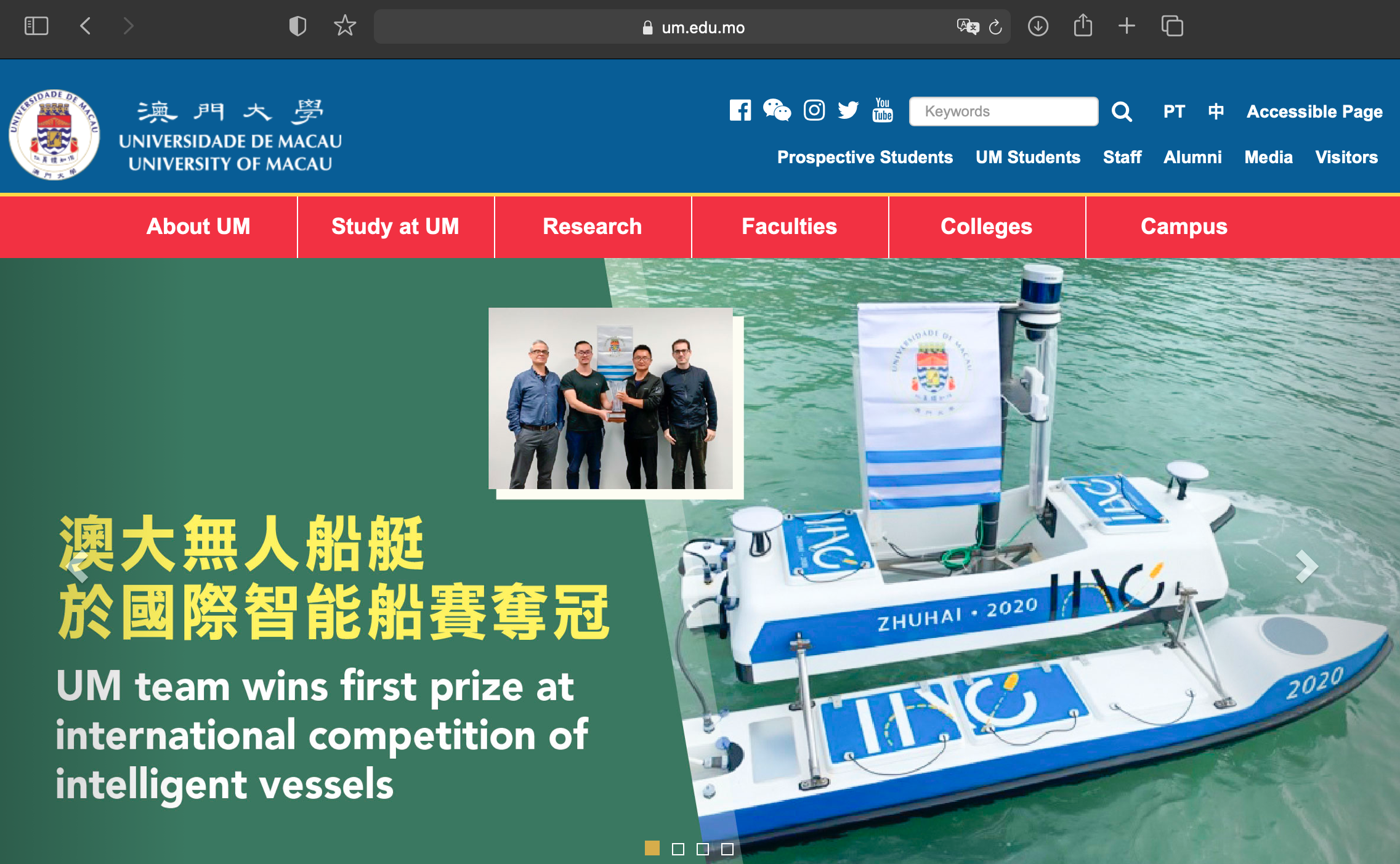
- Nov 2022, Champion of Sailing Race Project in Zhuhai Wanshan International Intelligent Vessel Competition (Press Release).
Invited talks
- September 2024, Chinese Academy of Engineering Academic Symposium on Engineering and Technology – Aerospace, Aviation, and Maritime Engineering Technology Seminar
- August 2023, Dalian University of Technology
- July 2023, Sun Yat-sen University
- February 2023, Shanghai Jiao Tong University
© Copyright 2024 Gan Yu. Last updated: November, 2024.